Ultralytics YOLO11
Genel Bakış
YOLO11, gerçek zamanlı nesne dedektörlerinin Ultralytics YOLO serisindeki en son yinelemedir ve en son doğruluk, hız ve verimlilikle mümkün olanı yeniden tanımlar. Önceki YOLO sürümlerinin etkileyici gelişmelerini temel alan YOLO11, mimari ve eğitim yöntemlerinde önemli iyileştirmeler sunarak, onu çok çeşitli bilgisayarla görme görevleri için çok yönlü bir seçim haline getirir.
Ultralytics YOLO11 🚀 NotebookLM tarafından oluşturulan Podcast
İzle: Nesne Algılama ve İzleme için Ultralytics YOLO11 Nasıl Kullanılır | Nasıl Kıyaslanır | YOLO11 YAYINLANDI🚀
Temel Özellikler
- Gelişmiş Özellik Çıkarımı: YOLO11, daha hassas nesne tespiti ve karmaşık görev performansı için özellik çıkarımı yeteneklerini geliştiren geliştirilmiş bir backbone ve neck mimarisi kullanır.
- Verimlilik ve Hız için Optimize Edildi: YOLO11, gelişmiş mimari tasarımlar ve optimize edilmiş eğitim işlem hatları sunarak daha hızlı işlem hızları sağlar ve doğruluk ile performans arasında optimum bir denge kurar.
- Daha Az Parametreyle Daha Yüksek Doğruluk: Model tasarımındaki gelişmelerle YOLO11m, YOLOv8m'den %22 daha az parametre kullanırken COCO veri kümesinde daha yüksek bir ortalama Ortalama Hassasiyet (mAP) elde ederek doğruluktan ödün vermeden hesaplama açısından verimli hale getirir.
- Ortamlar Arası Uyarlanabilirlik: YOLO11, uç cihazlar, bulut platformları ve NVIDIA GPU'ları destekleyen sistemler dahil olmak üzere çeşitli ortamlarda sorunsuz bir şekilde dağıtılabilir ve maksimum esneklik sağlar.
- Geniş Yelpazede Desteklenen Görevler: İster nesne algılama, örnek bölümleme, görüntü sınıflandırma, poz tahmini veya yönlendirilmiş nesne algılama (OBB) olsun, YOLO11 çeşitli bilgisayar görüşü zorluklarına hitap etmek için tasarlanmıştır.
Desteklenen Görevler ve Modlar
YOLO11, YOLOv8'de tanıtılan çok yönlü model yelpazesini temel alarak, çeşitli bilgisayarla görme görevlerinde gelişmiş destek sunar:
| Model | Dosya adları | Görev | Çıkarım | Doğrulama | Eğitim | Dışa aktar |
|---|---|---|---|---|---|---|
| YOLO11 | yolo11n.pt yolo11s.pt yolo11m.pt yolo11l.pt yolo11x.pt |
Algılama | ✅ | ✅ | ✅ | ✅ |
| YOLO11-seg | yolo11n-seg.pt yolo11s-seg.pt yolo11m-seg.pt yolo11l-seg.pt yolo11x-seg.pt |
Örnek Segmentasyonu | ✅ | ✅ | ✅ | ✅ |
| YOLO11-pose | yolo11n-pose.pt yolo11s-pose.pt yolo11m-pose.pt yolo11l-pose.pt yolo11x-pose.pt |
Poz/Anahtar Noktaları | ✅ | ✅ | ✅ | ✅ |
| YOLO11-obb | yolo11n-obb.pt yolo11s-obb.pt yolo11m-obb.pt yolo11l-obb.pt yolo11x-obb.pt |
Yönlendirilmiş Algılama | ✅ | ✅ | ✅ | ✅ |
| YOLO11-cls | yolo11n-cls.pt yolo11s-cls.pt yolo11m-cls.pt yolo11l-cls.pt yolo11x-cls.pt |
Sınıflandırma | ✅ | ✅ | ✅ | ✅ |
Bu tablo, YOLO11 model varyantlarına genel bir bakış sunarak, belirli görevlerdeki uygulanabilirliklerini ve Çıkarım, Doğrulama, Eğitim ve Dışa Aktarma gibi çalışma modlarıyla uyumluluklarını sergilemektedir. Bu esneklik, YOLO11'i gerçek zamanlı algılamadan karmaşık segmentasyon görevlerine kadar bilgisayarlı görüdeki çok çeşitli uygulamalar için uygun hale getirir.
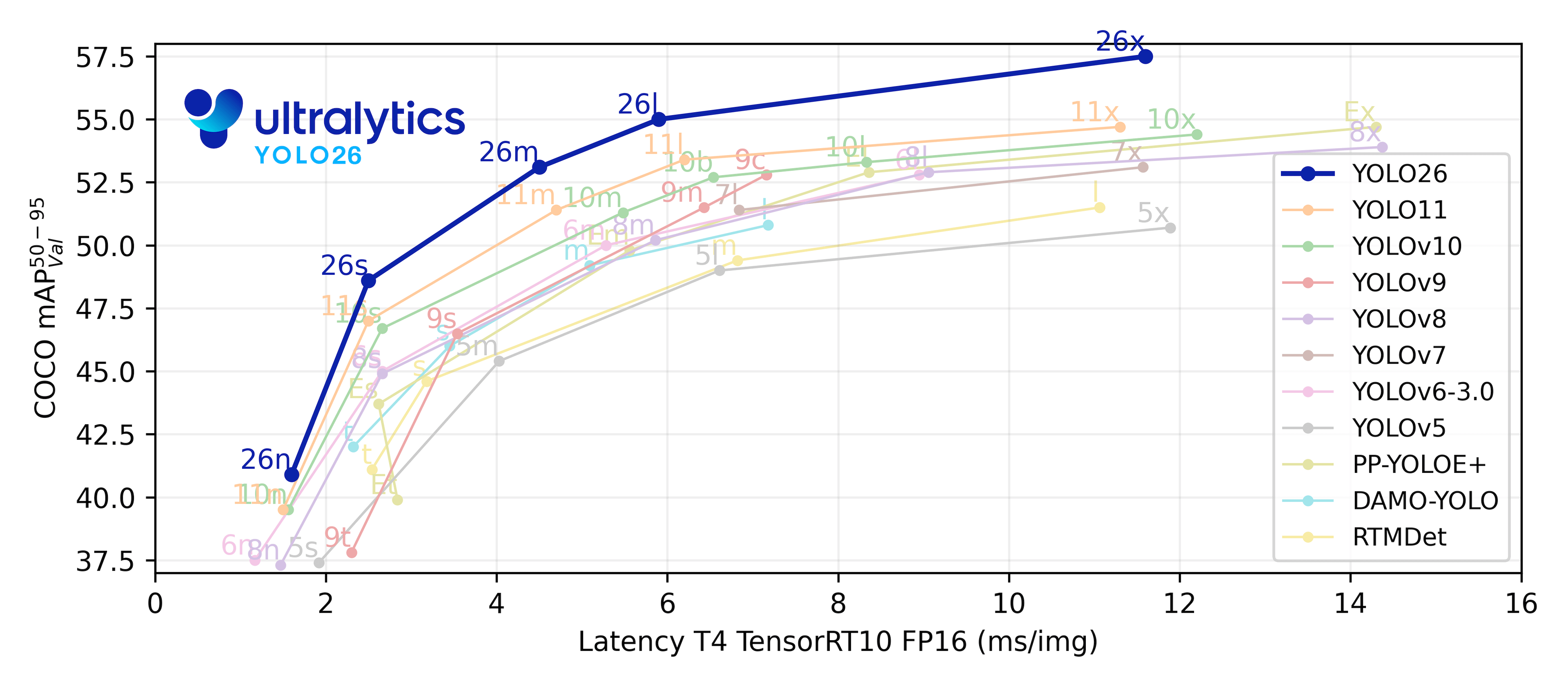
Performans Metrikleri
Performans
COCO üzerinde eğitilmiş ve 80 adet önceden eğitilmiş sınıfı içeren bu modellerle ilgili kullanım örnekleri için Algılama Belgelerine bakın.
| Model | boyut (piksel) |
mAPval 50-95 |
Hız CPU ONNX (ms) |
Hız T4 TensorRT10 (ms) |
parametreler (M) |
FLOP'lar (B) |
|---|---|---|---|---|---|---|
| YOLO11n | 640 | 39.5 | 56.1 ± 0.8 | 1.5 ± 0.0 | 2.6 | 6.5 |
| YOLO11s | 640 | 47.0 | 90.0 ± 1.2 | 2.5 ± 0.0 | 9.4 | 21.5 |
| YOLO11m | 640 | 51.5 | 183.2 ± 2.0 | 4.7 ± 0.1 | 20.1 | 68.0 |
| YOLO11l | 640 | 53.4 | 238.6 ± 1.4 | 6.2 ± 0.1 | 25.3 | 86.9 |
| YOLO11x | 640 | 54.7 | 462.8 ± 6.7 | 11.3 ± 0.2 | 56.9 | 194.9 |
80 önceden eğitilmiş sınıfı içeren COCO üzerinde eğitilmiş bu modellerle ilgili kullanım örnekleri için Segmentasyon Belgeleri'ne bakın.
| Model | boyut (piksel) |
mAPbox 50-95 |
mAPmask 50-95 |
Hız CPU ONNX (ms) |
Hız T4 TensorRT10 (ms) |
parametreler (M) |
FLOP'lar (B) |
|---|---|---|---|---|---|---|---|
| YOLO11n-seg | 640 | 38.9 | 32.0 | 65.9 ± 1.1 | 1.8 ± 0.0 | 2.9 | 10.4 |
| YOLO11s-seg | 640 | 46.6 | 37.8 | 117.6 ± 4.9 | 2.9 ± 0.0 | 10.1 | 35.5 |
| YOLO11m-seg | 640 | 51.5 | 41.5 | 281.6 ± 1.2 | 6,3 ± 0,1 | 22.4 | 123.3 |
| YOLO11l-seg | 640 | 53.4 | 42.9 | 344.2 ± 3.2 | 7.8 ± 0.2 | 27.6 | 142.2 |
| YOLO11x-seg | 640 | 54.7 | 43.8 | 664.5 ± 3.2 | 15.8 ± 0.7 | 62.1 | 319.0 |
1000 önceden eğitilmiş sınıfı içeren ImageNet üzerinde eğitilmiş bu modellerle ilgili kullanım örnekleri için Sınıflandırma Belgeleri'ne bakın.
| Model | boyut (piksel) |
acc top1 |
acc top5 |
Hız CPU ONNX (ms) |
Hız T4 TensorRT10 (ms) |
parametreler (M) |
FLOP'lar (Milyar) - 224 |
|---|---|---|---|---|---|---|---|
| YOLO11n-cls | 224 | 70.0 | 89.4 | 5.0 ± 0.3 | 1.1 ± 0.0 | 1.6 | 0.5 |
| YOLO11s-cls | 224 | 75.4 | 92.7 | 7.9 ± 0.2 | 1.3 ± 0.0 | 5.5 | 1.6 |
| YOLO11m-cls | 224 | 77.3 | 93.9 | 17.2 ± 0.4 | 2.0 ± 0.0 | 10.4 | 5.0 |
| YOLO11l-cls | 224 | 78.3 | 94.3 | 23.2 ± 0.3 | 2.8 ± 0.0 | 12.9 | 6.2 |
| YOLO11x-cls | 224 | 79.5 | 94.9 | 41.4 ± 0.9 | 3.8 ± 0.0 | 28.4 | 13.7 |
1 önceden eğitilmiş sınıf olan 'kişi'yi içeren COCO üzerinde eğitilmiş bu modellerle ilgili kullanım örnekleri için Poz Tahmini Belgeleri'ne bakın.
| Model | boyut (piksel) |
mAPpose 50-95 |
mAPpose 50 |
Hız CPU ONNX (ms) |
Hız T4 TensorRT10 (ms) |
parametreler (M) |
FLOP'lar (B) |
|---|---|---|---|---|---|---|---|
| YOLO11n-pose | 640 | 50.0 | 81.0 | 52,4 ± 0,5 | 1.7 ± 0.0 | 2.9 | 7.6 |
| YOLO11s-pose | 640 | 58.9 | 86.3 | 90.5 ± 0.6 | 2.6 ± 0.0 | 9.9 | 23.2 |
| YOLO11m-pose | 640 | 64.9 | 89.4 | 187.3 ± 0.8 | 4.9 ± 0.1 | 20.9 | 71.7 |
| YOLO11l-pose | 640 | 66.1 | 89.9 | 247.7 ± 1.1 | 6,4 ± 0,1 | 26.2 | 90.7 |
| YOLO11x-pose | 640 | 69.5 | 91.1 | 488.0 ± 13.9 | 12.1 ± 0.2 | 58.8 | 203.3 |
DOTAv1 üzerinde eğitilmiş bu modellerle kullanım örnekleri için Yönlendirilmiş Algılama Belgelerine bakın; bu belgelere 15 adet önceden eğitilmiş sınıf dahildir.
| Model | boyut (piksel) |
mAPtest 50 |
Hız CPU ONNX (ms) |
Hız T4 TensorRT10 (ms) |
parametreler (M) |
FLOP'lar (B) |
|---|---|---|---|---|---|---|
| YOLO11n-obb | 1024 | 78.4 | 117.6 ± 0.8 | 4.4 ± 0.0 | 2.7 | 17.2 |
| YOLO11s-obb | 1024 | 79.5 | 219.4 ± 4.0 | 5.1 ± 0.0 | 9.7 | 57.5 |
| YOLO11m-obb | 1024 | 80.9 | 562.8 ± 2.9 | 10.1 ± 0.4 | 20.9 | 183.5 |
| YOLO11l-obb | 1024 | 81.0 | 712.5 ± 5.0 | 13.5 ± 0.6 | 26.2 | 232.0 |
| YOLO11x-obb | 1024 | 81.3 | 1408.6 ± 7.7 | 28.6 ± 1.0 | 58.8 | 520.2 |
Kullanım Örnekleri
Bu bölüm, basit YOLO11 eğitimi ve çıkarım örnekleri sunmaktadır. Bunlar ve diğer modlar hakkında tam dokümantasyon için Predict, Train, Val ve Export doküman sayfalarına bakın.
Aşağıdaki örneğin, nesne algılama için YOLO11 Detect modelleri için olduğunu unutmayın. Ek desteklenen görevler için Segment, Classify, OBB ve Pose belgelerine bakın.
Örnek
PyTorch önceden eğitilmiş *.pt modellerin yanı sıra yapılandırma *.yaml dosyaları YOLO() Python'da bir model örneği oluşturmak için sınıf:
from ultralytics import YOLO
# Load a COCO-pretrained YOLO11n model
model = YOLO("yolo11n.pt")
# Train the model on the COCO8 example dataset for 100 epochs
results = model.train(data="coco8.yaml", epochs=100, imgsz=640)
# Run inference with the YOLO11n model on the 'bus.jpg' image
results = model("path/to/bus.jpg")
Modelleri doğrudan çalıştırmak için CLI komutları mevcuttur:
# Load a COCO-pretrained YOLO11n model and train it on the COCO8 example dataset for 100 epochs
yolo train model=yolo11n.pt data=coco8.yaml epochs=100 imgsz=640
# Load a COCO-pretrained YOLO11n model and run inference on the 'bus.jpg' image
yolo predict model=yolo11n.pt source=path/to/bus.jpg
Alıntılar ve Teşekkürler
Ultralytics YOLO11 Yayını
Ultralytics, modellerin hızla gelişen yapısı nedeniyle YOLO11 için resmi bir araştırma makalesi yayınlamadı. Statik dokümantasyon üretmek yerine, teknolojiyi geliştirmeye ve kullanımını kolaylaştırmaya odaklanıyoruz. YOLO mimarisi, özellikleri ve kullanımı hakkında en güncel bilgiler için lütfen GitHub depomuza ve belgelerimize bakın.
Çalışmanızda YOLO11'i veya bu depodaki başka bir yazılımı kullanıyorsanız, lütfen aşağıdaki formatı kullanarak atıfta bulunun:
@software{yolo11_ultralytics,
author = {Glenn Jocher and Jing Qiu},
title = {Ultralytics YOLO11},
version = {11.0.0},
year = {2024},
url = {https://github.com/ultralytics/ultralytics},
orcid = {0000-0001-5950-6979, 0000-0003-3783-7069},
license = {AGPL-3.0}
}
Lütfen DOI'nin beklemede olduğunu ve kullanılabilir olduğunda alıntıya ekleneceğini unutmayın. YOLO11 modelleri AGPL-3.0 ve Enterprise lisansları altında sağlanmaktadır.
SSS
Ultralytics YOLO11'deki önceki sürümlere kıyasla temel iyileştirmeler nelerdir?
Ultralytics YOLO11, önceki sürümlerine göre çeşitli önemli gelişmeler sunar. Başlıca iyileştirmeler şunlardır:
- Gelişmiş Özellik Çıkarımı: YOLO11, daha hassas nesne tespiti için özellik çıkarımı yeteneklerini geliştiren geliştirilmiş bir backbone ve neck mimarisi kullanır.
- Optimize Edilmiş Verimlilik ve Hız: Gelişmiş mimari tasarımlar ve optimize edilmiş eğitim işlem hatları, doğruluk ve performans arasında bir denge kurarken daha hızlı işlem hızları sağlar.
- Daha Az Parametreyle Daha Yüksek Doğruluk: YOLO11m, YOLOv8m'den %22 daha az parametreyle COCO veri kümesinde daha yüksek ortalama Ortalama Hassasiyet (mAP) elde ederek doğruluktan ödün vermeden hesaplama açısından verimli hale getirir.
- Ortamlar Arası Uyarlanabilirlik: YOLO11, uç cihazlar, bulut platformları ve NVIDIA GPU'ları destekleyen sistemler dahil olmak üzere çeşitli ortamlarda dağıtılabilir.
- Geniş Yelpazede Desteklenen Görevler: YOLO11, nesne algılama, örnek bölümleme, görüntü sınıflandırma, poz tahmini ve yönlendirilmiş nesne algılama (OBB) gibi çeşitli bilgisayar görüşü görevlerini destekler.
Nesne tespiti için bir YOLO11 modelini nasıl eğitirim?
Nesne algılama için bir YOLO11 modeli eğitimi, Python veya CLI komutları kullanılarak yapılabilir. Aşağıda her iki yöntem için de örnekler bulunmaktadır:
Örnek
from ultralytics import YOLO
# Load a COCO-pretrained YOLO11n model
model = YOLO("yolo11n.pt")
# Train the model on the COCO8 example dataset for 100 epochs
results = model.train(data="coco8.yaml", epochs=100, imgsz=640)
# Load a COCO-pretrained YOLO11n model and train it on the COCO8 example dataset for 100 epochs
yolo train model=yolo11n.pt data=coco8.yaml epochs=100 imgsz=640
Daha ayrıntılı talimatlar için Eğitim belgelerine bakın.
YOLO11 modelleri hangi görevleri gerçekleştirebilir?
YOLO11 modelleri çok yönlüdür ve aşağıdakiler dahil olmak üzere çok çeşitli bilgisayarla görme görevlerini destekler:
- Nesne Algılama: Bir görüntüdeki nesneleri tanımlama ve konumlandırma.
- Örnek Bölütleme: Nesneleri algılama ve sınırlarını belirleme.
- Görüntü Sınıflandırma: Görüntüleri önceden tanımlanmış sınıflara ayırma.
- Poz Tahmini: İnsan vücudundaki kilit noktaları tespit etme ve izleme.
- Yönlendirilmiş Nesne Tespiti (OBB): Daha yüksek hassasiyet için döndürme ile nesneleri tespit etme.
Her görev hakkında daha fazla bilgi için Algılama, Örnek Segmentasyonu, Sınıflandırma, Poz Tahmini ve Yönlendirilmiş Algılama belgelerine bakın.
YOLO11 daha az parametreyle nasıl daha yüksek doğruluk elde eder?
YOLO11, model tasarımı ve optimizasyon tekniklerindeki gelişmeler sayesinde daha az parametre ile daha yüksek doğruluk elde eder. Geliştirilmiş mimari, verimli özellik çıkarımı ve işleme sağlayarak, YOLOv8m'den %22 daha az parametre kullanırken COCO gibi veri kümelerinde daha yüksek ortalama Hassasiyet (mAP) sağlar. Bu, YOLO11'i doğruluktan ödün vermeden hesaplama açısından verimli hale getirerek, kaynak kısıtlı cihazlarda dağıtım için uygun kılar.
YOLO11, uç cihazlarda konuşlandırılabilir mi?
Evet, YOLO11, uç cihazlar da dahil olmak üzere çeşitli ortamlarda uyarlanabilirlik için tasarlanmıştır. Optimize edilmiş mimarisi ve verimli işleme yetenekleri, onu uç cihazlarda, bulut platformlarında ve NVIDIA GPU'ları destekleyen sistemlerde dağıtım için uygun hale getirir. Bu esneklik, YOLO11'in mobil cihazlarda gerçek zamanlı algılamadan bulut ortamlarındaki karmaşık segmentasyon görevlerine kadar çeşitli uygulamalarda kullanılabilmesini sağlar. Dağıtım seçenekleri hakkında daha fazla ayrıntı için Dışa Aktarma belgelerine bakın.





